Introducción
Los convertidores de frecuencia son dispositivos utilizados en los sistemas de accionamiento para controlar el par y la velocidad de los motores de corriente alterna mediante el control de la magnitud y la frecuencia de la tensión de alimentación. Para obtener una tensión alterna con las características deseadas, los variadores funcionan convirtiendo la tensión de red en tensión continua y volviéndola a convertir en tensión alterna, controlando los parámetros de esta segunda conversión, como se ilustra en la Figura 1.

Figura 1: Conversión de tensión en un inversor (Fuente: adaptado de Citisystems)
La tensión alterna de salida se genera a partir de impulsos de tensión continua, y al variar la frecuencia, la anchura y la señal de estos impulsos, la amplitud y la frecuencia de la tensión alterna de salida también cambian, como puede verse en la figura 2. Esta técnica se denomina modulación por anchura de impulsos, y es más conocida por sus siglas en inglés PWM.

Figura 2: Modulación PWM de un convertidor de frecuencia (Fuente: adaptado de Citisystems)
Uno de los problemas que puede causar esta característica del funcionamiento del variador es la excitación de los modos de vibración torsional del eje del motor y/o de la estructura en la que se encuentra. Esto se debe a que estas pulsaciones en la tensión de accionamiento del motor pueden provocar pulsaciones en el par motor, que a su vez pueden resonar con la estructura.
Este artículo trata de uno de los casos de éxito de Kot, en el que se llevó a cabo un análisis de investigación de la vibración de la plataforma de un sistema alimentador de calzado. La plataforma en cuestión soporta dos alimentadores, véase la figura 3, cuyos motores de accionamiento están controlados por convertidores de frecuencia, y mostraba vibraciones del suelo, la base de los motores y frecuentes fallos de los elementos elásticos de los acoplamientos.

Figura 3: Plataforma de alimentación (Fuente: colección Kot Engenharia)
Para determinar la causa de la vibración, Kot realizó inspecciones visuales, mediciones y análisis informáticos con el método de los elementos finitos (MEF).
Realización del servicio
Las actividades comenzaron con una visita al equipo, durante la cual se realizó una inspección visual, así como mediciones con una cámara de amplificación de movimiento y acelerometría en puntos de interés de la estructura. El objetivo principal de esta etapa era recopilar datos para formular hipótesis.
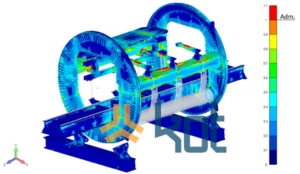
Una vez establecidas las hipótesis sobre la causa de la vibración, se realizaron simulaciones informáticas de la estructura para comprobar si la causa propuesta sería capaz de producir un comportamiento dinámico similar al observado. Para ello, se desarrollaron dos modelos diferentes: un modelo local de la base motriz y un modelo global de la plataforma, véase la figura 4. El modelo local se utilizó para realizar un análisis modal y dinámico transitorio más detallado de la base motriz, con el fin de cuantificar la magnitud de la excitación asociada a las vibraciones medidas. El modelo global, debido a las simplificaciones inherentes a los elementos de viga y a la rigidez de sus conexiones, se utilizó para comprender y evaluar el comportamiento general de la estructura cuando se somete a las cargas calibradas por el modelo detallado.

Figura 4: Modelos (Fuente: colección Kot Engenharia)
Por último, una vez que hubo coherencia entre la hipótesis planteada y los resultados de las simulaciones, se realizó una intervención en el equipo, seguida de nuevas mediciones para evaluar la eficacia de las modificaciones propuestas.
Resultados
Durante la inspección, se observó que la plataforma sólo mostraba vibraciones perceptibles cuando el nivel de material en el sistema superaba un determinado umbral y cuando los motores funcionaban a una frecuencia de rotación específica. Además, se observó que el aspecto del fallo de los acoplamientos de los motores era característico de la vibración torsional.
Las mediciones mostraron que la respuesta vertical en la base del motor es similar en magnitud a la respuesta horizontal, y que ambas son más pronunciadas que la respuesta longitudinal, como se muestra en el gráfico 1. Este comportamiento puede deberse a la vibración radial o torsional del motor, pero, dado el aspecto de fallo de los acoplamientos, se ha preferido la segunda opción.

Gráfico 1: Vibración medida en la base del motor (Fuente: Colección Kot Engenharia)
También se observó que tanto la plataforma como la base de los motores vibraban a la misma frecuencia, como se muestra en el gráfico 2, muy superior a la frecuencia de rotación de los motores. Esta respuesta tan pronunciada no se asocia a ningún comportamiento típico de problemas mecánicos del equipo en cuestión, dadas sus características constructivas. El vídeo 1 muestra una película de la plataforma vibrando, tomada con una cámara con amplificación de movimiento.

Gráfico 2: Comparación entre las mediciones en la plataforma y en la base del motor - Velocidad vertical (Fuente: Colección Kot Engenharia),
Vídeo 1: Filmación de la plataforma vibratoria - Cámara con amplificación de movimiento (Fuente: colección Kot Engenharia)
A partir de las características señaladas, se planteó la hipótesis de que la causa de la vibración sería una pulsación en el par de los motores, provocada por la modulación de la velocidad por el variador de frecuencia.
El análisis modal de la base de los accionamientos mostró que la frecuencia natural de torsión de esta estructura coincide con la frecuencia de vibración medida. El modo de vibración asociado se muestra en el vídeo 2. Además, en el análisis dinámico transitorio, se demostró que una pulsación del par de accionamiento, oscilando a esta frecuencia y con una magnitud inferior al par nominal del motor, sería capaz de provocar una vibración en la estructura con intensidad y características similares a las observadas en las mediciones. El gráfico 3 muestra una comparación entre las mediciones de vibración en la base del motor y los resultados obtenidos por el modelo.

Vídeo 2: Modo de vibración torsional de la base del motor (Fuente: colección Kot Engenharia)

Gráfico 3: Comparación entre la medición y el modelo - Velocidades en la base del motor (Fuente: Colección Kot Engenharia)
Los resultados del análisis de la respuesta en frecuencia mostraron que, cuando se excita mediante un impulso en el par motor a una frecuencia de aproximadamente 4 veces la velocidad del motor, la respuesta dinámica de la plataforma tiene características similares a las observadas en las mediciones, como se muestra en el gráfico 4.

Gráfico 4: Comparación entre la medición y el modelo - Velocidades en la plataforma (Fuente: colección Kot Engenharia)
Dado que los resultados de los análisis informáticos corroboraban la hipótesis planteada por Kot, se llevó a cabo una intervención en el equipo, en la que el fabricante ajustó los parámetros de funcionamiento del convertidor de frecuencia. Tras la intervención, las intensidades de vibración medidas en la plataforma y en las bases de los accionamientos, que anteriormente habían sido superiores a los límites normativamente admisibles, se redujeron significativamente y pasaron a ser inferiores a los límites normativos. Además, las respuestas empezaron a producirse en la frecuencia de rotación del motor y en su segundo armónico, lo cual es un comportamiento esperado para el equipo. El gráfico 5 muestra una comparación de la vibración horizontal medida en la base del motor antes y después de la intervención, mostrando el cambio en las frecuencias de respuesta y la reducción de la magnitud, que en este caso fue del 92%.

Gráfico 5: Comparación entre antes y después de la intervención - Velocidad horizontal en la base del motor (Fuente: Colección Kot Engenharia)
Conclusión
Los convertidores de frecuencia son un punto de atención en los problemas de vibración, y es importante discernir cuándo las características de la vibración apuntan a causas mecánicas o a causas eléctricas.
Gracias a las mediciones de las vibraciones, así como a la inspección visual, fue posible caracterizar correctamente las vibraciones de la estructura, lo que permitió identificar el inversor como la causa principal del problema, lo que pone de manifiesto la importancia de una correcta instrumentación de las estructuras y de un estudio de datos bien ejecutado.
Por último, los análisis informáticos resultaron ser una herramienta importante para validar las hipótesis planteadas, garantizando una mayor certeza en cuanto a la eficacia de la intervención propuesta, lo que contribuyó a minimizar las pérdidas y las repeticiones sobre el terreno.
Si usted, al igual que nuestros más de 150 clientes, busca soluciones de ingeniería para su explotación, póngase en contacto con nuestro equipo e infórmese sobre nuestros servicios. Desde 1993, nos hemos especializado en desarrollar soluciones de ingeniería utilizando métodos computacionales.
Siga nuestras páginas en LinkedIn, Facebook e Instagram para estar al día de nuestros contenidos.